在之前的DSO中的去畸变操作文章中,讲到DSO考虑了相机的成像过程对图像像素的影响:
- 在有光度参数的条件下,
DSO使用\(G^{-1}(I)\)非线性响应函数的逆过程和渐晕函数\(V(x)\)进行图像的光度去畸变操作,可以得到由能量单位组成的去光度畸变的图像。 - 在没有光度参数的条件下,
DSO使用仿射参数a和b来模拟光度参数的去畸变过程。 - 在DSO中的去畸变操作文章中,也进行了讨论,即去畸变得到的像素能量并不能保证同一点的一致性,因为还没有考虑曝光时间的影响。
1. 构建优化模型
SLAM十四讲中提到,直接法会直接使用像素的灰度值,构建优化模型的残差,其公式表示为\(r_k=I_i(p_i)-I_j(p_j)\)。由于DSO引入了仿射参数去光度畸变的操作,同时考虑了曝光时间对其一致性的影响,构建的残差应该为:
通过一些移项和变换的操作,并考虑像素块pattern的影响,就可以得到DSO论文里面给出的残差模型了:
其中:
- \(t_i\)和\(t_j\)分别为\(i\)帧和\(j\)帧的曝光时间,如果不存在曝光时间,则设定\(t_i=t_j=1\);
- \(a_i\)和\(b_i\)为\(i\)帧的仿射参数,\(a_j\)和\(b_j\)为\(j\)帧的仿射参数,如果存在光度参数和曝光时间,则设定\(a_j = a_i = b_j = b_i = 0\);
- \(I_i\)和\(I_j\)分别为\(i\)帧和\(j\)帧的去畸变图像,设定\(i\)帧为参考帧,而\(j\)帧为待估计帧;
- \(p\)和\(p'\)分别为\(i\)帧上的像素点和\(j\)帧上的像素点,其中\(p'\)是\(p\)经过反向投影,位姿变换和正向投影得到的像素点;
- \(\pi\)函数指的是从归一化坐标系到像素坐标系的投影,\(\pi^{-1}\)是\(\pi\)的反函数;
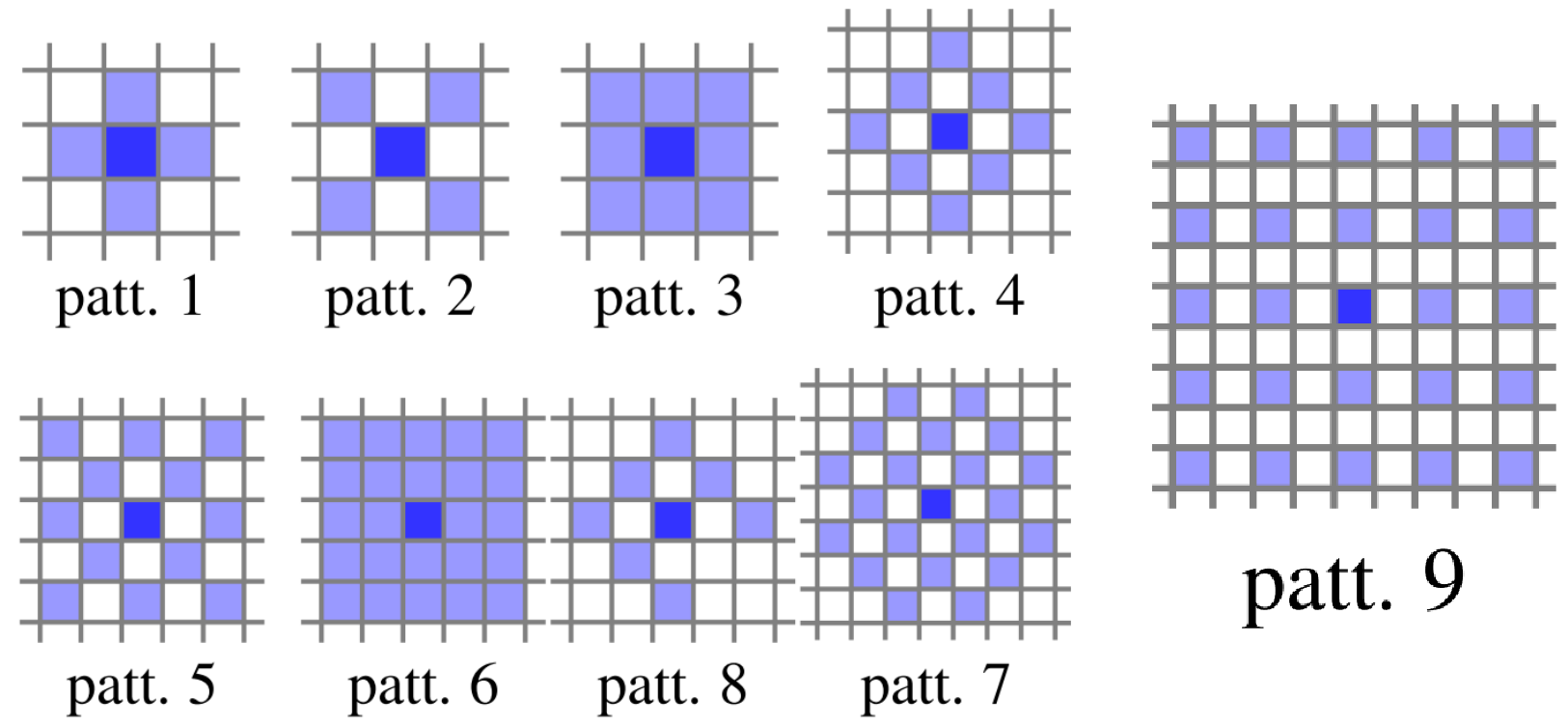
- \(\mathcal{N_{p_i}}\)为以\(i\)帧上的像素点\(p_i\)为中心的像素块,在
DSO的论文中,把他叫做一个pattern,DSO引入pattern的概念,认为在一个pattern上,所有像素的逆深度\(d_{pi}\)值保持一致,下图中是在DSO论文中讨论的一些pattern;
DSO的投影过程与普通BA之间存在区别?
在DSO构建的模型中,有一个与普通BA过程存在明显不同的地方,即在构建完成反向投影后,并不会使用\(R_{ji}\frac{P_{norm}}{d_{pi}}+t_{ji}\)来求解真实的3d点,而是使用\(R_{ji}P_{norm}+t_{ji}d_{pi}\)的方式,乘在了右边,构建了一个虚拟的3d点,这个虚拟3d点在坐标系原点真实3d的直线上,因此真实点和虚拟点之间对应着一个相同的归一化坐标系下的点。这么构建有一个比较明显的优势,即针对\(d_{pi}\)求导时,会变的比较简单。
2. 求解模型雅可比
现在,令\(r_k=I_j(p')-\frac{t_je^{a_j}}{t_ie^{a_i}}I_i(p)+\frac{t_je^{a_j}}{t_ie^{a_i}}b_i-b_j\),考虑使用GN法或者LM法求解这个优化问题,因此需要求解残差\(r_k\)对待优化量的雅可比矩阵,后续无论是需要为优化模型添加核函数,或者是求解优化模型的海塞矩阵H,都可以通过残差对待优化量的雅可比矩阵进行变换得到。
2.1 残差对位姿的雅可比矩阵
根据链式求导法则,残差对位姿\(T_{ji}\)的左侧扰动\(\xi\)的雅可比矩阵\(\frac{\partial{r_k}}{\partial{{\xi_{ji}}}}\):
- \(\frac{\partial{r_k}}{\partial I_j}\),根据残差公式,可以看出来\(\frac{\partial{r_k}}{\partial I_j}=1\);
- \(\frac{\partial{I_j}}{\partial{p'}}\),可以定义为\(p'\)在图像\(I_j\)上的像素梯度,以\([d_x,d_y]\)进行表示;
- \(\frac{\partial{p'}}{\partial{P_{norm}'}}\),这部分表示的是归一化坐标系到像素坐标系的投影过程,其雅可比矩阵可以使用如下公式进行表示;
-
\(\frac{\partial{P_{norm}'}}{\partial{P'}}\),这部分表示的是虚拟点\(P'\)到归一化坐标系的投影过程,根据公式不难推导出,其雅可比矩阵可以由下面的公式进行表示:
$$ \frac{\partial{P_{norm}'}}{\partial{P'}} = \begin{bmatrix}\frac{1}{P_Z'}&0&-\frac{P_X'}{P_Z'^2}\\0&\frac{1}{P_Z'}&-\frac{P_Y'}{P_Z'^2}\end{bmatrix} $$ -
\(\frac{\partial{P'}}{\partial{\xi_{ji}}}\),这部分表示的是虚拟
3d点位姿\(T_{ji}\)左乘扰动\(\xi_{ji}\)的雅可比矩阵,在视觉SLAM十四讲的中86页中推导过,这里只不过是针对虚拟点做了一些变换,可以得到\(\frac{\partial{P'}}{\partial{\xi_{ji}}}=[d_{pi}I,-P'^{\wedge}]\)
综上,通过链式法则将5部分的雅可比矩阵相乘可得残差对\(T_{ji}\)的左乘雅可比矩阵为:
2.2 残差对\(p_i\)点逆深度的雅可比矩阵
根据链式求导法则,残差对点的逆深度\(d_{pi}\)的雅可比矩阵\(\frac{\partial{r_k}}{\partial{{d_{pi}}}}\):
可以发现,残差对\(p_i\)点逆深度的链式求导的雅可比矩阵的前4部分都是相同的,因此只需要考虑\(\frac{\partial{P'}}{\partial{d_{pi}}}\)这部分的雅可比即可,从公式中不难推导出:
综上,通过链式法则将5部分的雅可比矩阵相乘可得残差对\(d_{pi}\)的雅可比矩阵为:
2.3 残差对光度仿射参数的雅可比矩阵
DSO在不同的阶段对光度仿射参数做了不同程度的处理,其主要表现在初始化阶段、前端跟踪阶段和后端滑窗阶段。其中,初始化阶段和前端跟踪阶段主要注重相对仿射参数\(a_{ji}\)和\(b_{ji}\),而在后端滑窗优化阶段中则更加注重全局的仿射参数\(a_j\)、\(b_j\)、\(a_i\)和\(b_i\)。
我打算分别在初始化、前端跟踪和后端滑窗优化三篇文章中单独对”DSO对仿射参数处理”进行解析说明,在这篇文章中就不过多赘述了。
3. 模型在后端优化中的问题
正如我在2.3小节中所描述的,DSO的模型在后端优化中会产生一些问题,原因在于后端优化的参数量为全局量,而不是相对量。即是global而非local。
其中在后端中需要特殊处理的参数主要有相对位姿\(T_{ji}\)转变为绝对位姿\(T_{jw}\)和\(T_{iw}\)、相对光度仿射参数\(a_{ji}\)和\(b_{ji}\)转变为全局光度仿射参数\(a_j\),\(b_j\),\(a_i\)和\(b_i\)。
模型如何在后端优化中解决这个问题的说明,我会在DSO滑窗优化后端中单独进行说明。
提前透漏
可以提前说明的是,在相对位姿转绝对位姿部分,DSO使用的是位姿矩阵伴随的性质,而光度仿射参数的转换则采用的是雅可比矩阵中转变换的方法。


Comments
有什么问题吗,有任何问题欢迎你在下面评论留言或者邮件联系我!